



本学理工研究域機械工学系の鈴木陽介助教,電気通信大学大学院情報理工学研究科の田中基康准教授らの研究グループは,人の入れない狭い場所で自由自在に動ける全長173センチメートル,重さ約9キログラムのヘビ型ロボット「T2 Snake-3」を開発しました。
今回開発したのは車輪部を関節で直列に連結したロボットで,17個の関節用モータと10個の車輪用モータが搭載されています。搭載したバッテリにより,先頭と最後尾に取り付けたカメラの映像を見ながら無線遠隔操縦で約1時間動作することができます。胴体の「細さ」を生かして幅25センチメートルの狭路を移動できる(図1)ほか,胴体の「長さ」を生かして障害物を越えることができ,最大で高さ1mの段差を登ることができます(図2)。各胴体底部には,鈴木助教が新たに開発した近接覚センサ(図3)が搭載されており,ロボットはそのセンサが計測した周囲環境までの距離や傾きの情報を用いて階段を巧みに登り降りすることができます(図4)。
開発したロボットは,将来的にはプラント内の巡回点検,家屋内やインフラの点検といった産業への展開が期待されます。
本研究成果は,内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジ(プログラム・マネージャー:田所諭)の一環として行われたものです。

図1.幅25センチメートルのL字狭路の通過

図2.高さ1メートルの段差登り
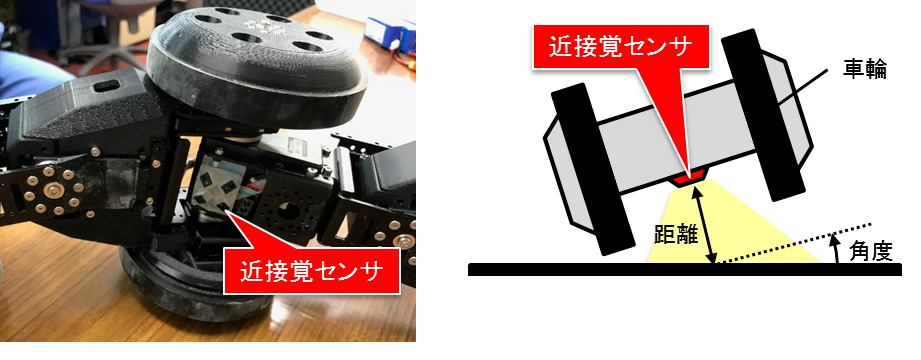
図3.近接覚センサ

図4.階段登り